Yunqing Gao received his B.S. degree in Automation from the University of Science and Technology of China (USTC) in 2020. He is currently pursuing the M.S. degree in Control Engineering at USTC. His research interests include automatic control and trajectory prediction
Hongbo Gao received his Ph.D. degree from Beihang University in 2016. He is currently an associate professor at the Department of Automation in the University of Science and Technology of China. He is the author or coauthor of over 40 journal papers, and the co-holder of 10 patent applications. His research interests include unmanned system platform, robotics, machine learning, decision support system, and intelligent driving
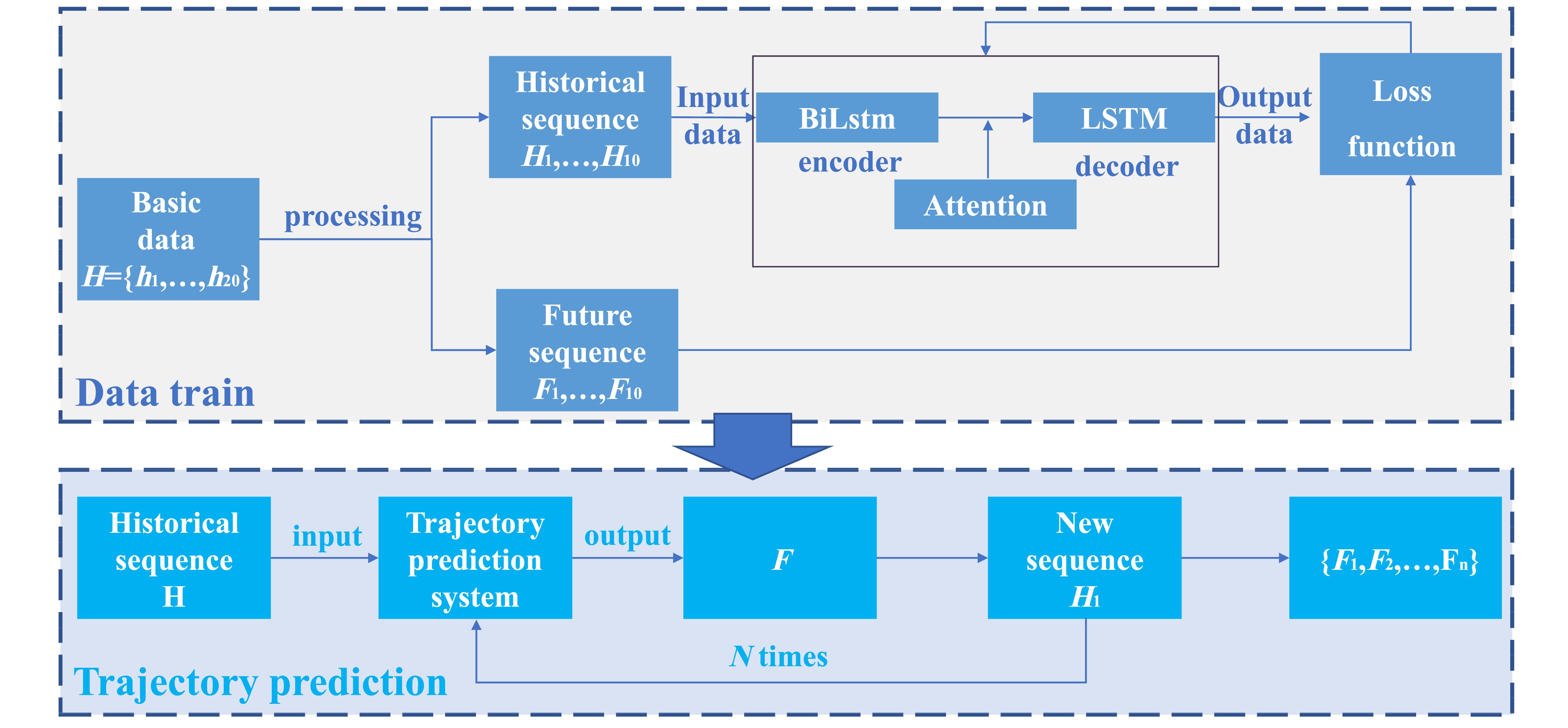
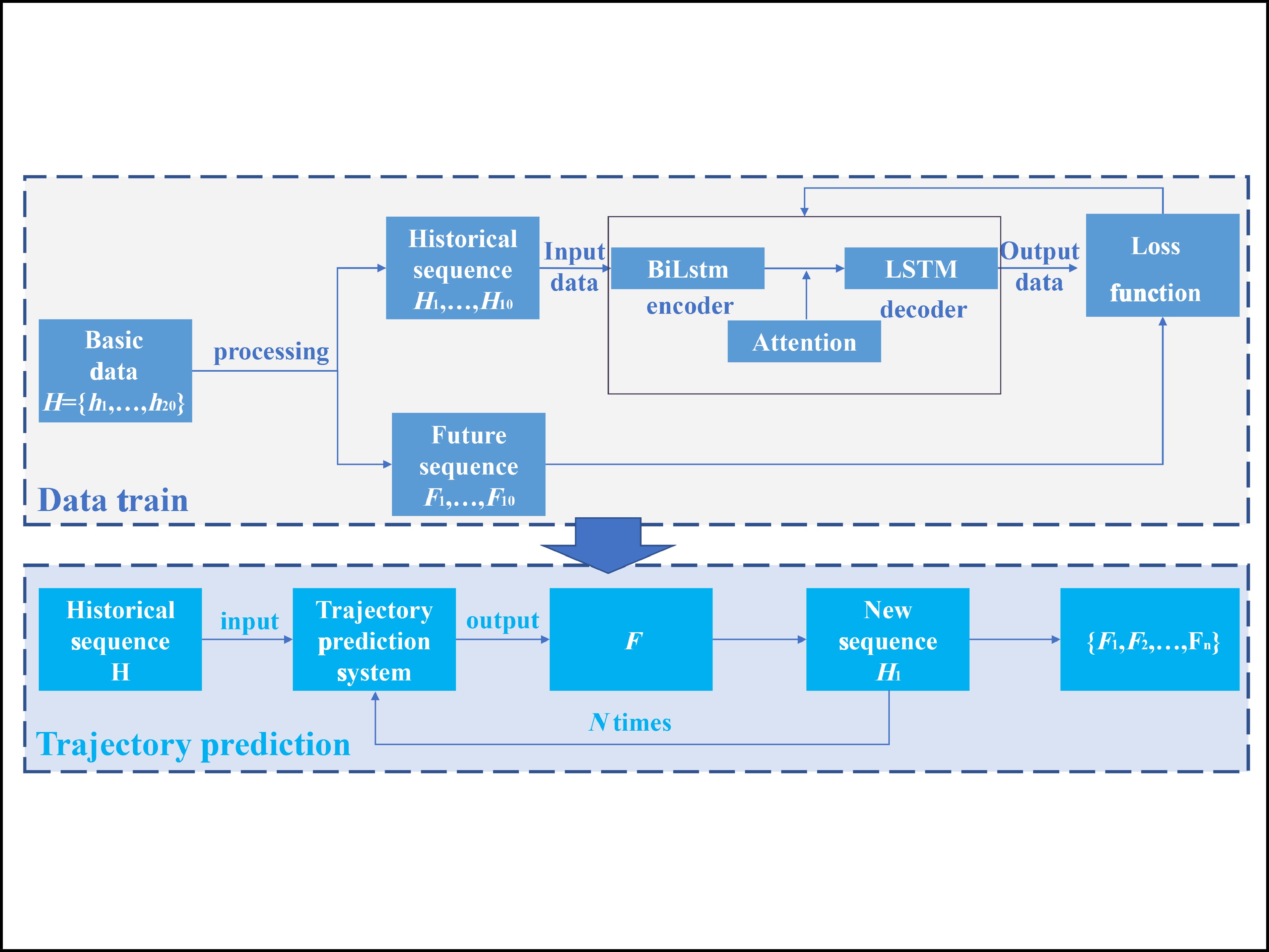
A surrounding vehicles behavior prediction method was presented for intelligent vehicles. The surrounding vehicles’ behavior is hard to predict since the significant uncertainty of vehicle driving and environmental changes. This method adopts bidirectional long short-term memory (BiLSTM) model combined with an encoder to ensure the memory of long-time series training. By constructing an attention mechanism based on BiLSTM, we consider the importance of different information which could guarantee the encoder’s memory under long sequence. The designed attention-bidirectional LSTM (Att-BiLSTM) model is adopted to ensure the surrounding vehicles’ prediction accuracy and effectiveness.
Graphical Abstract
Flowchart of the presented Att-BiLSTM algorithm.
Abstract
A surrounding vehicles behavior prediction method was presented for intelligent vehicles. The surrounding vehicles’ behavior is hard to predict since the significant uncertainty of vehicle driving and environmental changes. This method adopts bidirectional long short-term memory (BiLSTM) model combined with an encoder to ensure the memory of long-time series training. By constructing an attention mechanism based on BiLSTM, we consider the importance of different information which could guarantee the encoder’s memory under long sequence. The designed attention-bidirectional LSTM (Att-BiLSTM) model is adopted to ensure the surrounding vehicles’ prediction accuracy and effectiveness.
Public Summary
BiLSTM model combined with encoder is adopted to ensure the memory of long-time series training.
The importance of different states problem can be solved by considering the attention mechanism.
The Att-BiLSTM model is designed to ensure the surrounding vehicles prediction effectiveness and accuracy.
China has firmly set the goal of peak carbon emissions before 2030 and full carbon neutrality before 2060[1-3]. Against this background, the new energy vehicle (NEV) industry presents a new space for rapid growth. To promote the development of the NEV industry, China has successively issued a series of subsidies since 2009[4, 5]. In 2013, as the development of the NEV industry entered a new stage, China began to implement its program of retrogressive subsidies (PRS)1. The purpose of this policy is to reduce the impact of government intervention in the NEV industry by reducing the amount of subsidies year by year and to give full play to the decisive role of the market in resource allocation. Prior studies have shown that subsidies have promoted the development of China’s NEV industry[6, 7].
The COVID-19 pandemic, a major public emergency, has a significantly negative impact on human society. To cope with the negative influence of the COVID-19 pandemic on China’s NEV enterprises, the Chinese government issued the latest PRS on April 23, 2020, stating that China has decided to extend it until 2022, after which it may be completely cancelled2. Although previous scholars have conducted in-depth studies on the reaction of NEV enterprises’ stakeholders to the subsidy policy and the resulting change in enterprises’ performance, most of them tend to focus only on the reaction of corporate consumers to the subsidy policy and the resulting change in enterprises’ financial or innovation performance[8, 9]. As a result, they have ignored the reaction of corporate investors to the subsidy policy and the resulting change in the corporate market value. On the other hand, prior scholars have always tended to investigate the reaction of stakeholders to subsidy policies in the context of corporate daily operations[10-12]. However, few scholars have paid attention to it in the context of major public emergencies, such as COVID-19 pandemic. Based on this, this research aims to explore the reaction mechanism of NEV enterprise investors to the PRS in the context of COVID-19 pandemic.
Overall, based on the event study method, this study empirically tested the reaction mechanism of investors of NEV enterprises to China’s PRS in the context of COVID-19 pandemic and discussed the differences in investors’ reactions under different enterprise attributes (i.e., whether listed on the Shanghai Stock Exchange, whether located in a first-tier city, whether belonging to state-owned enterprises, and whether belonging to the upstream NEV industry).
The rest of the paper is organized as follows. Section 2 introduces the theoretical background and develops our hypotheses. Section 3 introduces the research design, and Section 4 analyzes the empirical results. The last section is the conclusions.
2.
Theoretical background and hypothesis development
2.1
The reaction of NEV enterprise investors to the PRS in the context of COVID-19 pandemic
Prospect theory was first proposed in 1979, which points out that people are different in their sensitivity to loss and gain, and the pain in the face of loss is much greater than the pleasure in the face of gain[13-16]. Therefore, when choosing between a certain profit and a risky gamble, people often choose a certain profit to avoid the risk of loss[17-19]. From an investor’s point of view, investors are generally reluctant to take risks[20]. For different investment projects with the same rate of return, investors will always choose the investment projects with the lowest risk[21, 22]. Based on this, investors’ perception of the future risks and benefits of the NEV industry will affect their behavioral feedback to NEV enterprises, which in turn affects the market value of NEV enterprises.
The NEV subsidy policy is crucial to the survival and development of the NEV industry in China[23, 24]. During the past ten years, the subsidy policy for NEVs has greatly stimulated consumers’ enthusiasm for purchasing NEVs and investors’ desire to invest in the enterprises that produce them, which has effectively promoted the development of the NEV industry in China[25, 26]. However, the sudden outbreak of COVID-19 in 2019 disrupted the orderly development of China’s NEV industry. To cope with its negative influence on China’s NEV enterprises, the Chinese government issued the latest PRS on April 23, 2020. However, due to information asymmetry, stakeholders may misunderstand this subsidy policy; that is, they may hold that the government will not have other subsidy policies after the implementation of the PRS. Therefore, investors may be concerned about the future development of NEV enterprises. In this case, based on the perspective of prospect theory, investors may be more inclined to place their funds in lower-risk industries. Based on the above logic, we assume the following hypothesis:
Hypothesis 1. The reaction of NEV enterprise investors to the PRS in the context of COVID-19 pandemic is likely to be negative.
2.2
The heterogeneous reaction of NEV enterprise investors: Shanghai vs. Shenzhen Stock Exchanges
Generally, the Shanghai Stock Exchange is dominated by large enterprises with stable performance, while the Shenzhen Stock Exchange is dominated by small- and medium-sized enterprises that are in their developmental stages[27, 28]. Therefore, on the whole, compared with enterprises listed on the Shenzhen Stock Exchange, enterprises listed on the Shanghai Stock Exchange are generally more equipped to manage uncertainties and risks. In this case, investors of NEV enterprises listed on the Shanghai Stock Exchange (vs. the Shenzhen Stock Exchange) should have a lower risk perception when facing the PRS in the context of COVID-19 pandemic. Based on the above logic, we assume the following hypothesis:
Hypothesis 2. The negative reaction of investors is weaker when NEV enterprises are listed on the Shanghai Stock Exchange (vs. the Shenzhen Stock Exchange).
2.3
The heterogeneous reaction of NEV enterprise investors: state-owned vs. nonstate-owned enterprises
State-owned enterprises, which act in an agency capacity on behalf of the government in the market economy[29, 30], are granted sufficient resources[31, 32], such as policy and industry information[33], subsidies[34] and tax breaks[35], by the state. These political resources can help such enterprises effectively cope with risks and unforeseen challenges[36–38]. Therefore, even after the issuance of the PRS in response to COVID-19 pandemic, state-owned enterprises still enjoy more resources than nonstate-owned enterprises in the postsubsidy era. As such, investors in nonstate-owned NEV enterprises should have a higher risk perception given the anticipated effects of the PRS. Based on the above logic, we assume the following hypothesis:
Hypothesis 3. The negative reaction of investors is stronger when NEV enterprises belong to nonstate-owned enterprises (vs. state-owned enterprises).
2.4
The heterogeneous reaction of NEV enterprise investors: first-tier cities vs. nonfirst-tier cities
Generally, first-tier cities have a higher level of economic development than nonfirst-tier cities. Therefore, the local governments in first-tier cities usually have a stronger ability to support local enterprises in the postsubsidy era. In addition, enterprises that can survive in first-tier cities usually have more resistance to uncertainties and risks than those in nonfirst-tier cities. In this case, investors in NEV enterprises in first-tier cities (vs. nonfirst-tier cities) should have a lower risk perception in response to the PRS in the context of COVID-19 pandemic. Based on the above logic, we assume the following hypothesis:
Hypothesis 4. The negative reaction of investors is weaker when NEV enterprises are located in first-tier cities (vs. nonfirst-tier cities).
2.5
The heterogeneous reaction of NEV enterprise investors in the supply chain
At present, the number of upstream enterprises is much higher than that of midstream and downstream enterprises in China’s NEV industry, which means that upstream enterprises will face greater competitive pressure when dealing with the uncertainties associated with future industry development. In other words, investors in upstream enterprises (vs. midstream and downstream enterprises) are more risk-aware when facing uncertainties. In this case, investors in upstream enterprises (vs. midstream and downstream enterprises) should have a higher risk perception in response to the PRS in the context of COVID-19 pandemic. Based on the above logic, we assume the following hypothesis:
Hypothesis 5. The negative reaction of investors is stronger for upstream (vs. midstream and downstream) NEV enterprises.
3.
Research design
3.1
Sample selection and data source
A total of 171 automobile enterprises listed on the Shenzhen and Shanghai Stock Exchanges were selected as samples in this study. Specifically, the sample source is Choice3, which is among the top financial databases in China. Based on the industry classification of listed enterprises by Choice, we obtained a sample of 209 listed enterprises whose main line of business is in the automobile industry. Considering that this study focuses on the PRS issued on April 23, 2020, we excluded 31 samples with market dates after April 23, 2020. Additionally, to prevent confounding events that fall within seven days of the issuance of the PRS and to avoid using an insufficient return prediction period, we also removed 7 unqualified samples[39, 40]. After accounting for these considerations, we obtained a sample of 171 listed auto enterprises, of which 109 are considered NEV enterprises and 62 are considered nonnew energy vehicle (NNEV) enterprises based on the classification set forth by Choice.
Cumulative abnormal return (CAR) is the explanatory variable we use to probe the effect of the PRS on corporate market value. Following prior studies, CAR related to the critical event is calculated within a 3-day time window (i.e., −1,0,and+1 days) [41]. Concretely:
Abnormal return (AR) refers to the unexpected percentage difference between the expected normal and actual returns. The market model is used to calculate the normal return, AR and CAR[40], namely:
Rit=Ii+SiRmt+ETit,
where Rit is the normal return of security i on day t, Ii is the intercept, Si is the systematic risk related to security i, Rmt is the return on the market portfolio of stocks on day t, and ETit is the error term of security i on day t.
Next, AR is calculated as:
ARit=Rit−(Xi+ZiRmt),
where ARit is the AR of security i on day t and Xi and Zi belong to the ordinary least squares (OLS) parameter estimates of security i. CAR for the 3-day time window for each security i is thus calculated as
CAR(−1,0,+1)=n=(−1,0,+1)∑t=nARit.
The expected normal returns are estimated using a trailing period of 128 to 8 trading days before the critical event[40]. We regard the PRS issued on April 23, 2020, as the critical event. Since the policy promulgation time (17:08) is the closing time of the stock market on that day (13:00–15:00), we choose April 24, 2020, as the event date. The daily market return volatility is calculated using the equal weight average of the Shanghai Stock Exchange Composite Index and the Shenzhen Stock Exchange Component Index[40-42]. All data were collected from the CSMAR4.
3.2.2
Explanatory variable
Whether it is an NEV enterprise: If the firm is classified as a new energy concept by Choice, it is considered to be an NEV enterprise and given the value of “1”; otherwise, it is given the value of “0”.
Listed on the Shanghai Stock Exchange: If the firm is listed on the Shanghai Stock Exchange, it is given the value of “1”; otherwise, it is given the value of “0”.
Whether it is a state-owned enterprise: If the firm is ultimately controlled by the State-Owned Assets Committee of China, it is given the value of “1”; otherwise, it is given the value of “0”.
Is it located in the first-tier city: If the firm was headquartered in a first-tier city (i.e., Beijing, Shanghai, Guangzhou and Shenzhen) in 2020, it is given the value of “1”; otherwise, it is given the value of “0”.
Supply chain position: If the firm is mainly engaged in supplying raw materials and accessories/automobile manufacturing/vehicle sales, it is considered to be in the upstream/midstream/downstream of the supply chain and given the value of “1”; otherwise, it is given the value of “0”.
3.2.3
Descriptive statistics
Tables 1 and 2 show the statistical data of the variables.
3.2.4
Kolmogorov–Smirnov (KS) test and Wilcoxon signed-rank test
To explore the effect of the PRS on the market value of NEV enterprises, we decided to follow Lo et al.[43] by applying the methods of an independent sample t-test or a Wilcoxon signed-rank test. Through the KS test, we found that all explained variables did not conform to the normal distribution (see Table 3); thus, the Wilcoxon signed-rank test was adopted (compared to the default median “0”).
It can be seen from Table 4 that the negative reaction of NEV enterprise investors is significant (Day−1to1,z=−3.048, p=0.002), while the negative reaction of NNEV enterprise investors is not significant (Day −1 to 1, z=0.007, p=0.994). Hypothesis 1 is thus proven. Additionally, Day −1 is not significant, thus indicating that no information is leaked before the event.
Table
4.
Wilcoxon signed-rank test between NEV and NNEV enterprises.
We further analyze charts of the stock market to identify the reaction of investors (see Fig. 1). Fig. 1 shows that the AAR is significantly negative from the first day (Day 0) and reaches the negative pole on the third day (Day 2). This reveals a coupling relationship between the dissemination period of policy information and the negative reaction of investors.
Figure
1.
NEV enterprise investors’ reaction to the PRS.
Table 5 reveals the difference in the reaction of investors of NEV enterprises listed on the Shanghai and Shenzhen Stock Exchanges. Table 5 shows that the market value of NEV enterprises listed on the Shenzhen Stock Exchange suffers a greater negative impact (Day −1 to 1, z=−4.022, p=0.000). Hypothesis 2 is therefore tested. The results show that investors have more confidence in NEV enterprises on the Shanghai Stock Exchange (vs. the Shenzhen Stock Exchange) in the postsubsidy era.
Table
5.
Wilcoxon signed-rank test between the Shanghai and Shenzhen Stock Exchanges.
Table 6 shows the difference in the reaction of investors of state-owned and nonstate-owned firms. From Table 6, it can be seen that the market value of nonstate-owned enterprises suffers a greater negative impact (Day −1 to 1, z=−3.115, p=0.002). Hypothesis 3 is thus proven. Our results echo those of Wang et al.[8] and support our view that state-owned NEV enterprises have more political resources to ensure their survival and development, and their investors will thus have higher confidence in their development prospects in the postsubsidy era.
Table
6.
Wilcoxon signed-rank test between state-owned and nonstate-owned firms.
Table 7 shows the difference in the reaction of investors of NEV enterprises in different geographical locations. Table 7 shows that the market value of NEV enterprises located in first-tier cities suffers a less negative impact (Day −1 to 1, z=−1.704, p=0.088). Hypothesis 4 is thus proven. Our results confirm our view that investors will have more confidence in NEV enterprises located in first-tier cities (vs. nonfirst-tier cities) in the postsubsidy era.
Table
7.
Wilcoxon signed-rank test between first-tier cities and nonfirst-tier cities.
Table 8 shows the difference in the reaction of investors of NEV enterprises with different supply chain locations. It can be seen from Table 8 that the market value of NEV enterprises located in the upstream market segment suffers a greater negative impact (Day −1 to 1, z=−2.792, p=0.005). Hypothesis 5 is thus proven. Our results confirm our view that investors may have less confidence in upstream (vs. midstream and downstream) NEV enterprises in the postsubsidy era.
Table
8.
Wilcoxon signed-rank test in the supply chain.
First, the results of Day 0, Day 1, and Day 0 to 1 in Tables 4 to 8 are consistent with Day −1 to 1, thus indicating the robustness of our results. Second, to verify the validity of the Wilcoxon signed-rank test, the binomial sign test was selected as an alternative method (see Tables S1−S5 in Supporting Information). Our key results remain unchanged. Finally, we regard the new first-tier cities determined in 2020 as first-tier cities and empirically retest the first-tier cities variable. The results remain robust (see Tables S6 and S7 in Supporting Information).
5.
Conclusions
COVID-19 pandemic has a serious negative impact on China’s economy, especially in the NEV industry, which is in its early developmental stages. To address the negative impact of COVID-19 pandemic on China’s NEV industry, the Chinese government issued the latest PRS on April 23, 2020. To explore the reaction mechanism of NEV enterprise investors to the PRS in the context of COVID-19 pandemic, 171 Chinese listed auto enterprises were selected as samples. Based on the event study method, this study discussed the differences in investors’ reactions under different enterprise attributes (i.e., whether listed on the Shanghai Stock Exchange, whether located in a first-tier city, whether belonging to state-owned enterprises, and whether belonging to the upstream NEV enterprises. Overall, we obtained five results. First, due to information asymmetry, the reaction of NEV enterprise investors to the PRS in the context of COVID-19 pandemic is negative. Second, the negative reaction of investors is weaker when NEV enterprises are listed on the Shanghai Stock Exchange (vs. the Shenzhen Stock Exchange). Third, the negative reaction of investors is stronger when NEV enterprises belong to nonstate-owned enterprises (vs. state-owned enterprises). Fourth, the negative reaction of investors is weaker when NEV enterprises are located in first-tier cities (vs. nonfirst-tier cities). Finally, the negative reaction of investors is stronger for upstream (vs. midstream and downstream) NEV enterprises. Overall, the results of this study provide empirical evidence for the effectiveness of risk aversion in prospect theory in practice and enrich the application scenario of prospect theory.
This study’s contribution to the literature is threefold. First, our study provides empirical evidence for analyzing the reaction of NEV enterprise investors to the government subsidy policy, which enriches the literature focusing on the reaction of stakeholders to the government subsidy policy. Second, this study analyzes the reaction of NEV enterprise investors to the PRS in the context of COVID-19 pandemic from multiple perspectives, thus providing practical insight for NEV enterprises to make decisions on stakeholder management strategies in the context of major public emergencies. Finally, by comparing and analyzing the degree of change in the market value of NEV enterprises with different attributes when the PRS is issued, our study provides practical recommendations on how to formulate government policy response strategies according to the unique needs of each situation.
Our study also makes several practical recommendations for NEV enterprises and their investors. First, when the state announces subsidy policies similar to PRS, enterprises should communicate information with external investors in a timely manner to prevent losses caused by stakeholders’ misunderstanding, especially in the context of major public emergencies, such as COVID-19 pandemic. Second, NEV enterprises should convey reliable signals to investors in the daily operation process to prevent them from suffering market value loss in the context of information asymmetry, especially for nonstate-owned enterprises, enterprises in the Shenzhen Stock Exchange and nonfirst-tier cities, as well as upstream enterprises with greater pressure of competition. Finally, investors of NEV enterprises should believe in the scientific nature and effectiveness of national policies to avoid causing their own losses due to misunderstanding.
Our research also presents several limitations. On the one hand, this study only focuses on NEV enterprises in the automobile industry. There are other firms in other industries related to NEV, which can be included in the sample for further exploration in future research. On the other hand, this study only focuses on the key subsidy policy made by the government in response to COVID-19 pandemic. As the situation of the epidemic changes, the government may introduce other follow-up policies. Therefore, future research can continue to explore the reaction mechanism of NEV enterprise investors to other policies on the basis of this study.
Conflict of Interest
The authors declare that they have no conflict of interest.
BiLSTM model combined with encoder is adopted to ensure the memory of long-time series training.
The importance of different states problem can be solved by considering the attention mechanism.
The Att-BiLSTM model is designed to ensure the surrounding vehicles prediction effectiveness and accuracy.
Li D, Gao H. A hardware platform framework for an intelligent vehicle based on a driving brain. Engineering,2018, 4 (4): 464–470. DOI: 10.1016/j.eng.2018.07.015
[2]
Lefèvre S, Vasquez D, Laugier C. A survey on motion prediction and risk assessment for intelligent vehicles. Robomech Journal,2014, 1 (1): 1–14. DOI: 10.1186/s40648-014-0001-z
[3]
Brännström M, Coelingh E, Sjöberg J. Model-based threat assessment for avoiding arbitrary vehicle collisions. IEEE Transactions on Intelligent Transportation Systems,2010, 11 (3): 658–669. DOI: 10.1109/TITS.2010.2048314
[4]
Ortiz M G, Fritsch J, Kummert F, et al. Behavior prediction at multiple time-scales in inner-city scenarios. In: 2011 IEEE Intelligent Vehicles Symposium (IV). Baden-Baden, Germany: IEEE, 2011: 1068−1073.
[5]
Xie G, Gao H, Qian L, et al. Vehicle trajectory prediction by integrating physics-and maneuver-based approaches using interactive multiple models. IEEE Transactions on Industrial Electronics,2018, 65 (7): 5999–6008. DOI: 10.1109/TIE.2017.2782236
[6]
Zheng X, Zhang D, Gao H, et al. A novel framework for road traffic risk assessment with HMM-based prediction model. Sensors,2018, 18 (12): 4313. DOI: 10.3390/s18124313
[7]
Gao H, Cheng B, Wnag K, et al. Object classification using CNN-based fusion of vision and LIDAR in autonomous vehicle environment. IEEE Transactions on Industrial Informatics,2018, 14 (9): 4224–4231. DOI: 10.1109/TII.2018.2822828
[8]
Gao H, Su H, Cai Y, et al. Trajectory prediction of cyclist based on dynamic Bayesian network and long short-term memory model at unsignalized intersections. Science China Information Sciences,2021, 64: 172207. DOI: 10.1007/s11432-020-3071-8
[9]
Pu J, Zhou W, Hu H, et al. Boosting continuous sign language recognition via cross modality augmentation. In: Proceedings of the 28th ACM International Conference on Multimedia. Seattle, USA: Association for Computing Machinery, 2020: 1497–1505.
[10]
Ondruska P, Posner I. Deep tracking: Seeing beyond seeing using recurrent neural networks. Proceedings of the AAAI Conference on Artificial Intelligence,2016, 30 (1): 3361–3367. DOI: 10.1609/aaai.v30i1.10413
[11]
Khosroshahi A, Ohn-Bar E, Trivedi M M. Surround vehicles trajectory analysis with recurrent neural networks. In: 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). Piscataway, USA: IEEE, 2016: 2267–2272.
[12]
Jeong Y, Kim S, Yi K. Surround vehicle motion prediction using LSTM-RNN for motion planning of autonomous vehicles at multi-lane turn intersections. IEEE Open Journal of Intelligent Transportation Systems,2020, 1: 2–14. DOI: 10.1109/OJITS.2020.2965969
[13]
Park S H, Kim B D, Kang C M, et al. Sequence-to-sequence prediction of vehicle trajectory via LSTM encoder-decoder architecture. In: 2018 IEEE Intelligent Vehicles Symposium (IV). Jiangsu, China: IEEE, 2018: 1672–1678.
[14]
Benterki A, Judalet V, Maaoui C, et al. Multi-model and learning-based framework for real-time trajectory prediction. In: 2020 28th Mediterranean Conference on Control and Automation. Akko, Israel: IEEE, 2020: 776–781.
[15]
Gao H, Guo F, Zhu J, et al. Human motion segmentation based on structure constraint matrix factorization. Science China Information Sciences,2022, 65: 119103. DOI: 10.1007/s11432-020-2967-3
[16]
Dai S, Li L, Li Z. Modeling vehicle interactions via modified LSTM models for trajectory prediction. IEEE Access,2019, 7: 38287–38296. DOI: 10.1109/ACCESS.2019.2907000
[17]
Xin L, Wang P, Chan C Y, et al. Intention-aware long horizon trajectory prediction of surrounding vehicles using dual LSTM networks. In: 2018 21st International Conference on Intelligent Transportation Systems (ITSC). Hawaii, USA: IEEE, 2018: 1441–1446.
[18]
Guan D, Zhao H, Zhao L, et al. Intelligent prediction of mobile vehicle trajectory based on space-time information. In: 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring). Kuala Lumpur, Malaysia: IEEE, 2019: 1–5.
[19]
Gao H, Zhu J, Zhang T, et al. Situational assessment for intelligent vehicles based on stochastic model and Gaussian distributions in typical traffic scenarios. IEEE Transactions on Systems, Man, and Cybernetics: Systems,2022, 52 (3): 1426–1436. DOI: 10.1109/TSMC.2020.3019512
[20]
Jeong Y, Yi K. Bidirectional long shot-term memory-based interactive motion prediction of cut-in vehicles in urban environments. IEEE Access,2020, 8: 106183–106197. DOI: 10.1109/ACCESS.2020.2994929
[21]
Lenz D, Diehl F, Le M T, et al. Deep neural networks for Markovian interactive scene prediction in highway scenarios. In: 2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles, USA: IEEE, 2017: 685–692.
[22]
Deo N, Trivedi M M. Multi-modal trajectory prediction of surrounding vehicles with maneuver based LSTMs. In: 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu, China: IEEE, 2018: 1179–1184.
[23]
Shi X, Chen Z, Wang H, et al. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. In: Proceedings of the 28th International Conference on Neural Information Processing Systems-Volume 1. Montreal, Canada: MIT Press, 2015: 802–810.
[24]
Shi X, Gao Z, Lausen L, et al. Deep learning for precipitation nowcasting: A benchmark and a new model. [2022-06-15]. https://arxiv.org/abs/1706.03458.
Figure
3.
The cyclic unit structure of LSTM network.
Figure
4.
Attention mechanism-based BiLSTM.
Figure
5.
Loss change curve of training and test sets.
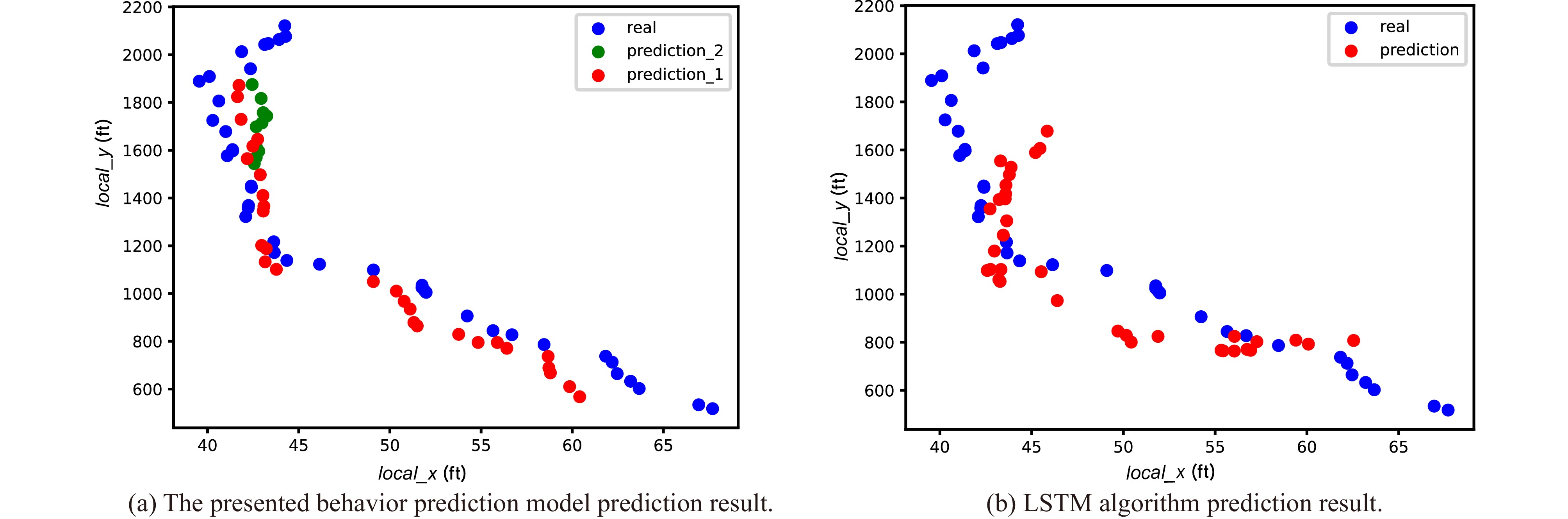
Figure
6.
The prediction results with ID 30000 car.
Figure
7.
The prediction results with ID 20000 car.
Figure
8.
Comparison of different forecasting time series.
Figure
9.
The mean square error between the forecast result and the real result of each model.
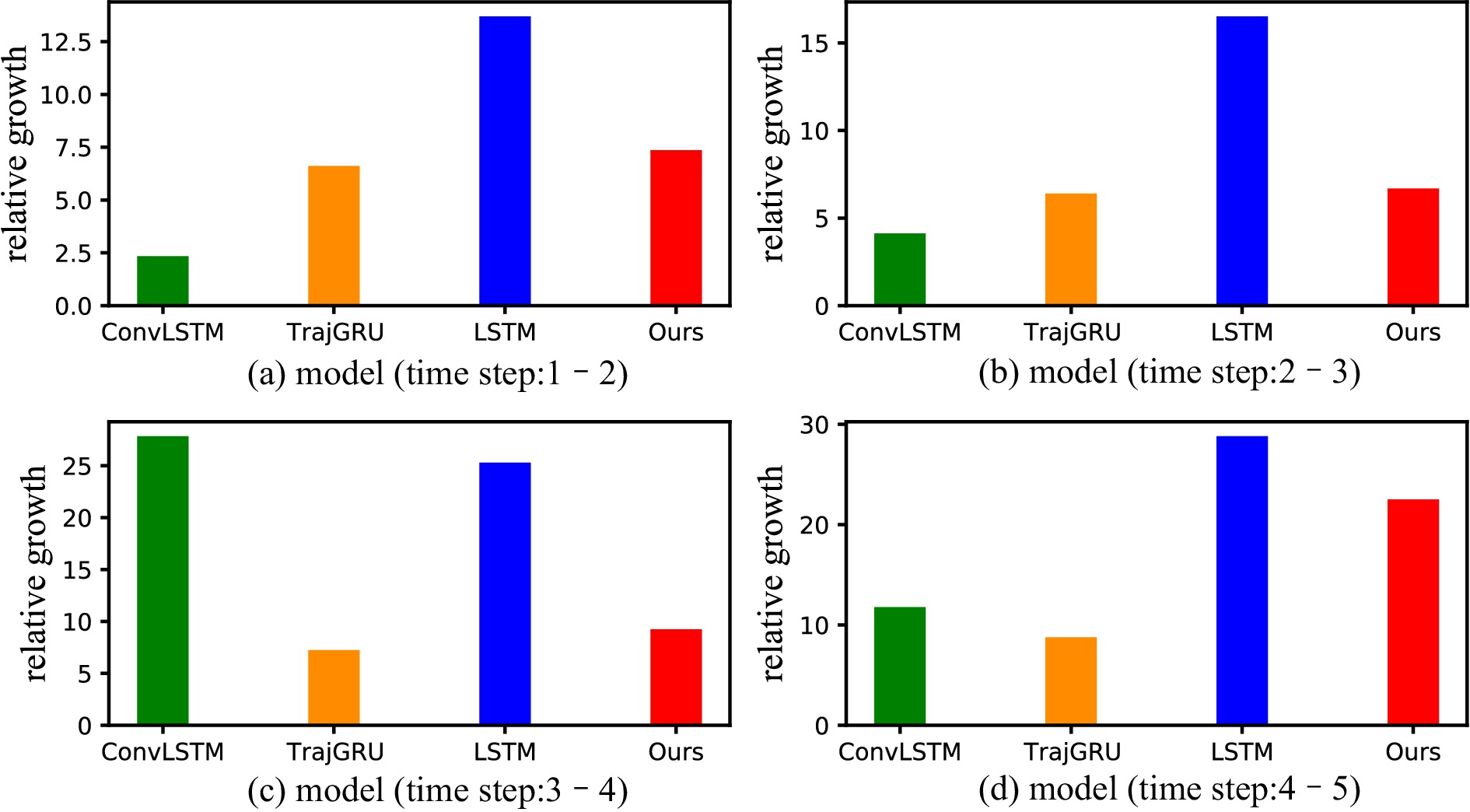
Figure
10.
The increase of prediction time step on the interference degree of each model.
References
[1]
Li D, Gao H. A hardware platform framework for an intelligent vehicle based on a driving brain. Engineering,2018, 4 (4): 464–470. DOI: 10.1016/j.eng.2018.07.015
[2]
Lefèvre S, Vasquez D, Laugier C. A survey on motion prediction and risk assessment for intelligent vehicles. Robomech Journal,2014, 1 (1): 1–14. DOI: 10.1186/s40648-014-0001-z
[3]
Brännström M, Coelingh E, Sjöberg J. Model-based threat assessment for avoiding arbitrary vehicle collisions. IEEE Transactions on Intelligent Transportation Systems,2010, 11 (3): 658–669. DOI: 10.1109/TITS.2010.2048314
[4]
Ortiz M G, Fritsch J, Kummert F, et al. Behavior prediction at multiple time-scales in inner-city scenarios. In: 2011 IEEE Intelligent Vehicles Symposium (IV). Baden-Baden, Germany: IEEE, 2011: 1068−1073.
[5]
Xie G, Gao H, Qian L, et al. Vehicle trajectory prediction by integrating physics-and maneuver-based approaches using interactive multiple models. IEEE Transactions on Industrial Electronics,2018, 65 (7): 5999–6008. DOI: 10.1109/TIE.2017.2782236
[6]
Zheng X, Zhang D, Gao H, et al. A novel framework for road traffic risk assessment with HMM-based prediction model. Sensors,2018, 18 (12): 4313. DOI: 10.3390/s18124313
[7]
Gao H, Cheng B, Wnag K, et al. Object classification using CNN-based fusion of vision and LIDAR in autonomous vehicle environment. IEEE Transactions on Industrial Informatics,2018, 14 (9): 4224–4231. DOI: 10.1109/TII.2018.2822828
[8]
Gao H, Su H, Cai Y, et al. Trajectory prediction of cyclist based on dynamic Bayesian network and long short-term memory model at unsignalized intersections. Science China Information Sciences,2021, 64: 172207. DOI: 10.1007/s11432-020-3071-8
[9]
Pu J, Zhou W, Hu H, et al. Boosting continuous sign language recognition via cross modality augmentation. In: Proceedings of the 28th ACM International Conference on Multimedia. Seattle, USA: Association for Computing Machinery, 2020: 1497–1505.
[10]
Ondruska P, Posner I. Deep tracking: Seeing beyond seeing using recurrent neural networks. Proceedings of the AAAI Conference on Artificial Intelligence,2016, 30 (1): 3361–3367. DOI: 10.1609/aaai.v30i1.10413
[11]
Khosroshahi A, Ohn-Bar E, Trivedi M M. Surround vehicles trajectory analysis with recurrent neural networks. In: 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). Piscataway, USA: IEEE, 2016: 2267–2272.
[12]
Jeong Y, Kim S, Yi K. Surround vehicle motion prediction using LSTM-RNN for motion planning of autonomous vehicles at multi-lane turn intersections. IEEE Open Journal of Intelligent Transportation Systems,2020, 1: 2–14. DOI: 10.1109/OJITS.2020.2965969
[13]
Park S H, Kim B D, Kang C M, et al. Sequence-to-sequence prediction of vehicle trajectory via LSTM encoder-decoder architecture. In: 2018 IEEE Intelligent Vehicles Symposium (IV). Jiangsu, China: IEEE, 2018: 1672–1678.
[14]
Benterki A, Judalet V, Maaoui C, et al. Multi-model and learning-based framework for real-time trajectory prediction. In: 2020 28th Mediterranean Conference on Control and Automation. Akko, Israel: IEEE, 2020: 776–781.
[15]
Gao H, Guo F, Zhu J, et al. Human motion segmentation based on structure constraint matrix factorization. Science China Information Sciences,2022, 65: 119103. DOI: 10.1007/s11432-020-2967-3
[16]
Dai S, Li L, Li Z. Modeling vehicle interactions via modified LSTM models for trajectory prediction. IEEE Access,2019, 7: 38287–38296. DOI: 10.1109/ACCESS.2019.2907000
[17]
Xin L, Wang P, Chan C Y, et al. Intention-aware long horizon trajectory prediction of surrounding vehicles using dual LSTM networks. In: 2018 21st International Conference on Intelligent Transportation Systems (ITSC). Hawaii, USA: IEEE, 2018: 1441–1446.
[18]
Guan D, Zhao H, Zhao L, et al. Intelligent prediction of mobile vehicle trajectory based on space-time information. In: 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring). Kuala Lumpur, Malaysia: IEEE, 2019: 1–5.
[19]
Gao H, Zhu J, Zhang T, et al. Situational assessment for intelligent vehicles based on stochastic model and Gaussian distributions in typical traffic scenarios. IEEE Transactions on Systems, Man, and Cybernetics: Systems,2022, 52 (3): 1426–1436. DOI: 10.1109/TSMC.2020.3019512
[20]
Jeong Y, Yi K. Bidirectional long shot-term memory-based interactive motion prediction of cut-in vehicles in urban environments. IEEE Access,2020, 8: 106183–106197. DOI: 10.1109/ACCESS.2020.2994929
[21]
Lenz D, Diehl F, Le M T, et al. Deep neural networks for Markovian interactive scene prediction in highway scenarios. In: 2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles, USA: IEEE, 2017: 685–692.
[22]
Deo N, Trivedi M M. Multi-modal trajectory prediction of surrounding vehicles with maneuver based LSTMs. In: 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu, China: IEEE, 2018: 1179–1184.
[23]
Shi X, Chen Z, Wang H, et al. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. In: Proceedings of the 28th International Conference on Neural Information Processing Systems-Volume 1. Montreal, Canada: MIT Press, 2015: 802–810.
[24]
Shi X, Gao Z, Lausen L, et al. Deep learning for precipitation nowcasting: A benchmark and a new model. [2022-06-15]. https://arxiv.org/abs/1706.03458.






 DownLoad:
DownLoad: